Hi, i would like to visualize the solution for the eigen modes of a solid mesh in my own ui.
For this i put all the needed things like, vertex positions, triangle indices and the mode shape evaluated at mesh vertices on the gpu buffer to do the deformation in the vertex shader with
in vec3 real;
in vec3 imag;
uniform float time_value;
...
float pi = 3.14159;
float scale = 10.;
vec3 displacement = real*cos(2.*pi*time_value) + imag*sin(2.*pi*time_value);
vec3 r = vertexMC.xyz + displacement*scale;
gl_Position = MCDCMatrix * vec4(r, 1.0);
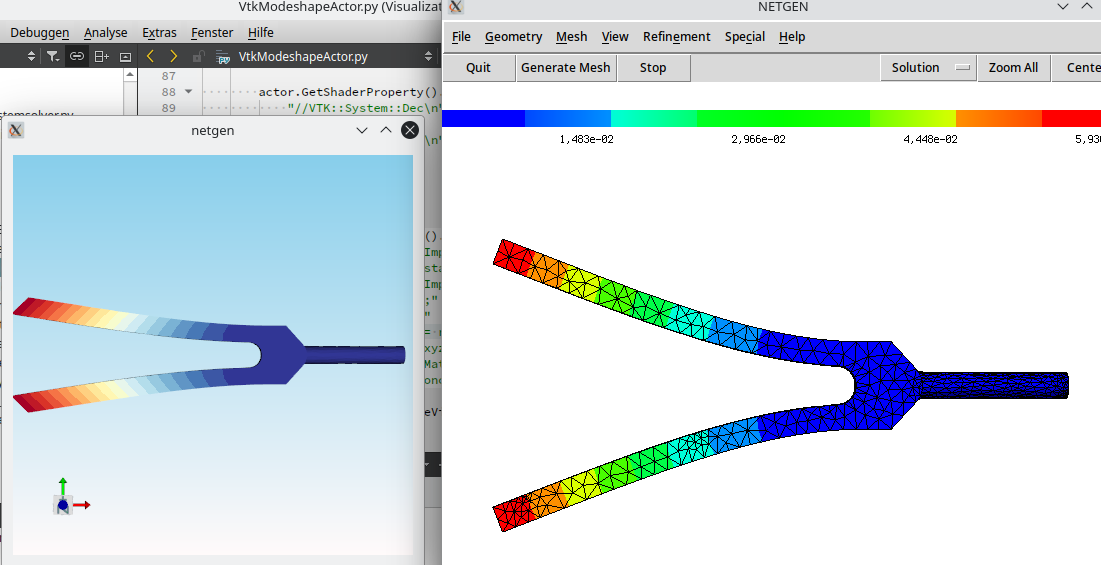
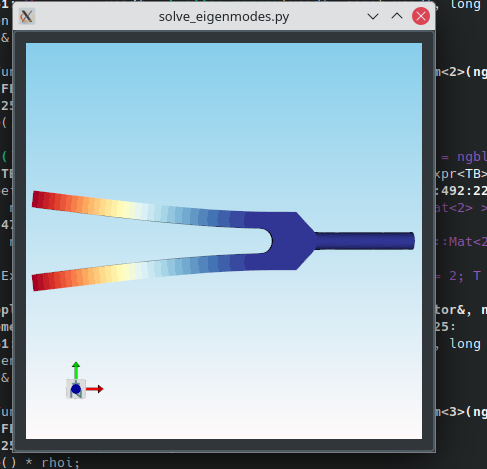
With this, I get not the same result as by using the deformation checkbox in the ngsolve native ui.
Left is my implementation and right the ngsolve native ui, in my implementation the 2 tips of the tuningfork (left) looks not as the one in the ngsolve ui.
The result looks not completely wrong but different. My question is how is the deformation done in the ngsolve ui ? How can i get same results ?
Ok, i found a solution by using a custom filter instead of directly modifing vertex positions in shader. i use vtkProgrammableFilter and it is suprisingly fast