Hello NGSolve folks,
I have following code:
from netgen.occ import *
from ngsolve import *
from netgen.meshing import IdentificationType
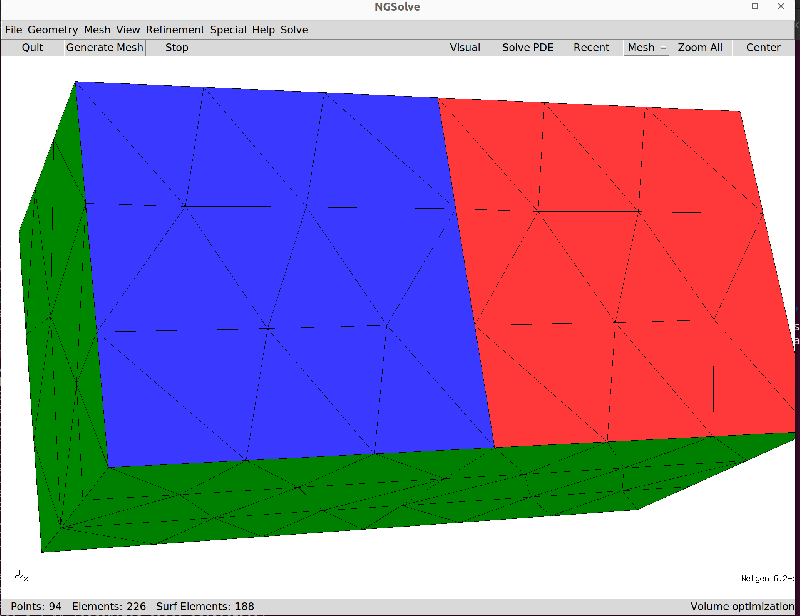
b = Box((-1.0, -0.5, 0), (0.0, 0.5, 1.0))
a = Box((0.0, -0.5, 0), (1.0, 0.5, 1.0))
a.faces.Max(Z).col = (1, 0, 0)
b.faces.Max(Z).col = (0, 0, 1)
trafo = Rotation(Axis((0, 0, 0), Y), 180)
a.faces.Max(Z).Identify(b.faces.Max(Z), "periodic", IdentificationType.PERIODIC, trafo)
geo_objects = Glue([a, b])
geo = OCCGeometry(geo_objects)
mesh = Mesh(geo.GenerateMesh(maxh=0.4))
Draw(mesh)
where I would like to specify rotational periodicity between the red and blue face.
Unfortunately it seems that the identifcation is not successful
(no Map face 1 → 2 output; no identified points).
I have tried different configurations, e.g., a block between so that there is no shared
edge - but this did not help.
Any suggestions ? Thank you.
(likely related with https://ngsolve.org/forum/ngspy-forum/1683-opencascade-geometry-periodic-boundary-conditions ?)
Hi Phil,
I don’t know if you check the forum regularly so I am writing to you in case you get a notification.
Professor Schöberl answered to the other post with the solution to this problem:
https://ngsolve.org/forum/ngspy-forum/1683-opencascade-geometry-periodic-boundary-conditions#4737
We were not giving the correct transformation.
Best,
Alessio
Thanks @acesarano for sharing your solution.
I think this might be a different issue. For example, while following code works:
from netgen.occ import *
from ngsolve import *
from netgen.meshing import IdentificationType
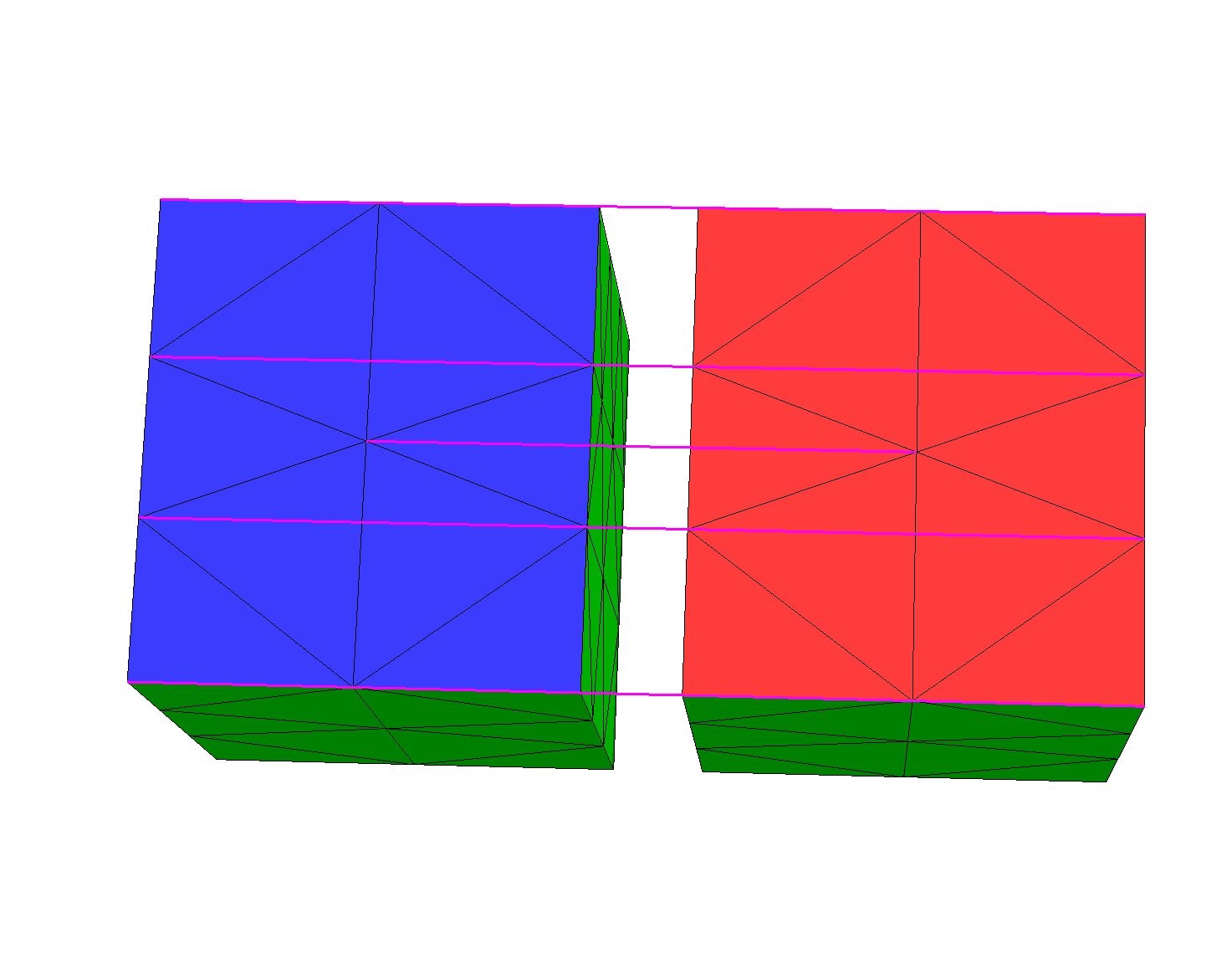
half_gap_distance = 0.1
b = Box((-1.0, -0.5, 0), (-half_gap_distance, 0.5, 1.0))
a = Box((half_gap_distance, -0.5, 0), (1.0, 0.5, 1.0))
a.faces.Max(Z).col = (1, 0, 0)
b.faces.Max(Z).col = (0, 0, 1)
trafo = Rotation(Axis((0, 0.5, 1), Y), 180)
a.faces.Max(Z).Identify(b.faces.Max(Z), "periodic", IdentificationType.PERIODIC, trafo)
geo_objects = Glue([a, b])
geo = OCCGeometry(geo_objects)
mesh = Mesh(geo.GenerateMesh(maxh=0.4))
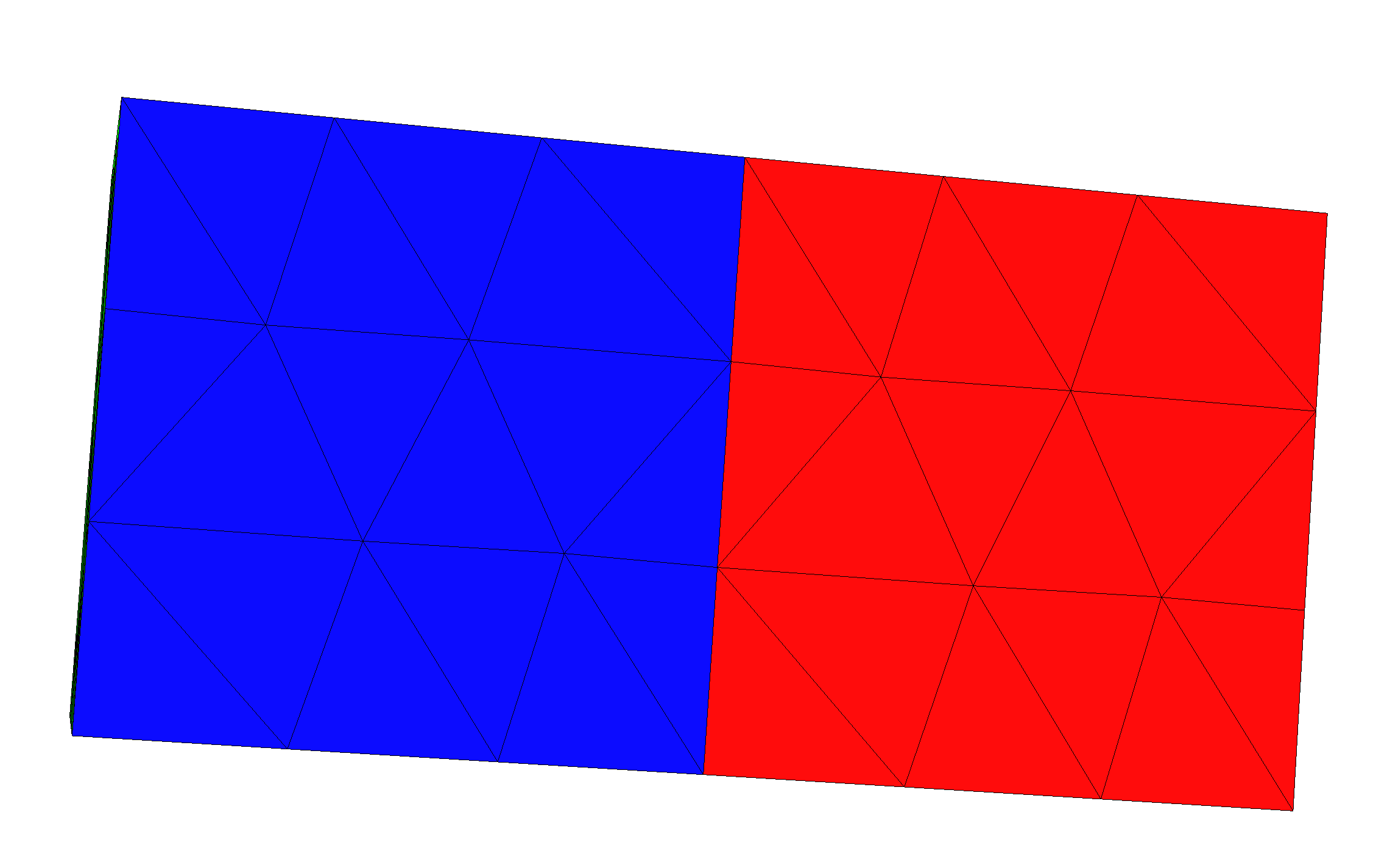
Reducing the gap distance to 0 (so that the cubes touch each other), the identification fails:
half_gap_distance = 0.0
Shows no identified points.
Many thanks,
Paul